 关于GOC
关于GOC 加入我们
加入我们

影响系数法是现场动平衡的主流算法,但它有自己的精度上限。理解这个上限,比盲目追求最低振动值更有实际意义。
一、影响系数法的工作原理
基本逻辑:在转子已知位置安装已知质量的试重,观察振动响应(幅值和相位)的变化,建立「试重→响应」的线性关系,据此反推消除不平衡所需的配重方案。
这个方法有一个核心假设:转子是线性系统,响应与激励成比例。实际工程中,这个假设在多数情况下成立,但有若干条件影响精度。
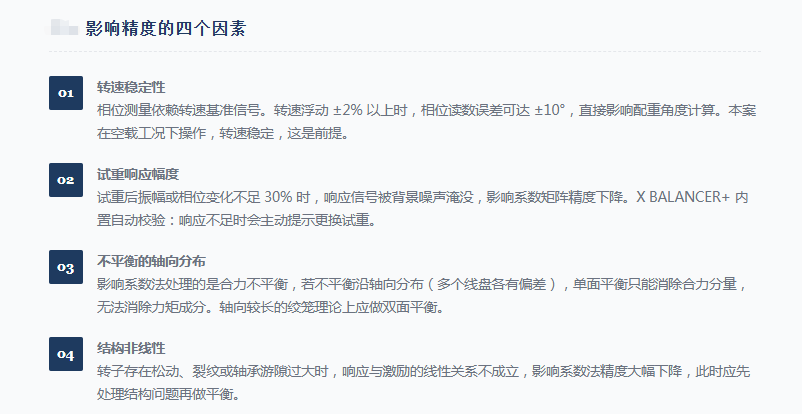
二、影响精度的四个因素
 01
01
转速稳定性
相位测量依赖转速基准信号。转速浮动 ±2% 以上时,相位读数误差可达 ±10°,直接影响配重角度计算。本案在空载工况下操作,转速稳定,这是前提。
02
试重响应幅度
试重后振幅或相位变化不足 30% 时,响应信号被背景噪声淹没,影响系数矩阵精度下降。X BALANCER+ 内置自动校验:响应不足时会主动提示更换试重。
03
不平衡的轴向分布
影响系数法处理的是合力不平衡,若不平衡沿轴向分布(多个线盘各有偏差),单面平衡只能消除合力分量,无法消除力矩成分。轴向较长的绞笼理论上应做双面平衡。
04
结构非线性
转子存在松动、裂纹或轴承游隙过大时,响应与激励的线性关系不成立,影响系数法精度大幅下降,此时应先处理结构问题再做平衡。
三、本案数据:两次迭代的必要性

绞线机动平衡过程数据(2400 rpm,单面)
初始振动8.3 mm/s · 47° · ISO D区
试重(50g @ 0°)后响应11.2 mm/s · 121°(幅值变化+35%,相位变化74°)
计算配重方案73g @ 312°
第一次验证结果1.8 mm/s(改善 78%)
微调(减 5g)后最终结果1.1 mm/s(改善 87%)· ISO A/B区
⚠
工程现实:第一次配重后达到 78% 改善是典型结果,期待一次配重达到最终目标并不现实。计划 2~3 次迭代,逐步收敛,比期望单次到位更符合影响系数法的实际精度特性。
四、何时停止?判断终止条件
动平衡的终止条件不是「越低越好」,而是以下三个条件之一满足时:① 振动进入 ISO 1940 规定的目标平衡等级对应的残余不平衡限值;② 进一步减少振动需要的配重调整量低于仪器质量分辨率(0.1g级);③ 残余振动接近测量背景噪声水平,继续迭代无实质收益。
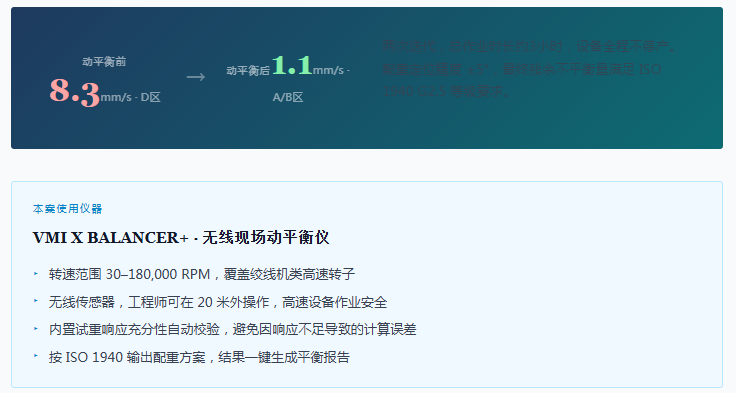
动平衡前8.3mm/s · D区
→
动平衡后1.1mm/s · A/B区
两次迭代,总作业时长约3小时,设备全程不停产。配重定位精度 ±5°,最终残余不平衡量满足 ISO 1940 G2.5 等级要求。
本案使用仪器

VMI X BALANCER+ · 无线现场动平衡仪
- 转速范围 30–180,000 RPM,覆盖绞线机类高速转子
- 无线传感器,工程师可在 20 米外操作,高速设备作业安全
- 内置试重响应充分性自动校验,避免因响应不足导致的计算误差
- 按 ISO 1940 输出配重方案,结果一键生成平衡报告
